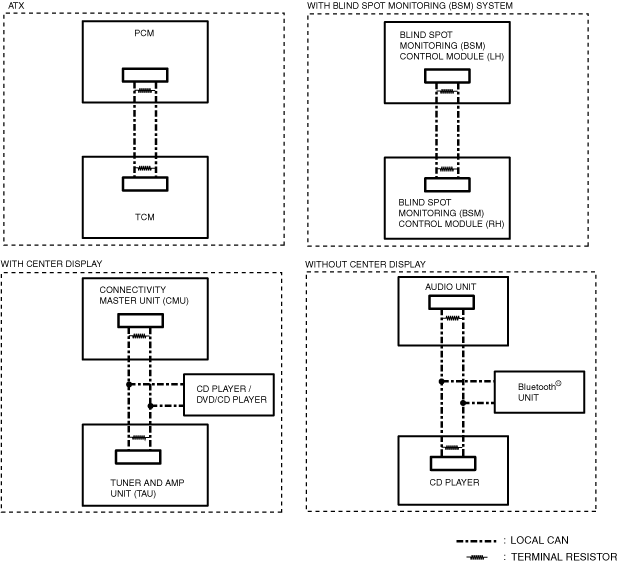
― Between PCM terminals 1A (CAN_H) and 1B (CAN_L) (SKYACTIV-G 2.0, SKYACTIV-G 2.5)
― Between PCM terminals 1AD (CAN_H) and 1Y (CAN_L) (SKYACTIV-D 2.2)
― Between TCM terminals G (CAN_H) and H (CAN_L)
― Between audio unit terminals 1O (CAN_H) and 1Q (CAN_L)
― Between CD player terminals G (CAN_H) and H (CAN_L) (Without center display)
― Between connectivity master unit (CMU) terminals 2I (CAN_H) and 2J (CAN_L)
― Between tuner and amp unit (TAU) terminals 2O (CAN_H) and 2Q (CAN_L) (L.H.D.)
― Between tuner and amp unit (TAU) terminals 1AA (CAN_H) and 1AB (CAN_L) (R.H.D.)
― Between blind spot monitoring (BSM) control module (LH) terminals A (CAN_H) and B (CAN_L) (Australian specs.)
― Between blind spot monitoring (BSM) control module (RH) terminals A (CAN_H) and B (CAN_L) (Australian specs.)
― Between blind spot monitoring (BSM) control module (LH) terminals G (CAN_H) and J (CAN_L) (Except Australian specs.)
― Between blind spot monitoring (BSM) control module (RH) terminals G (CAN_H) and J (CAN_L) (Except Australian specs.)